Introduction
Controller capabilities are improving every day. In addition, with the costs of industrial
automation technologies and control systems at an all time low, and increasingly robust control algorithms being developed every day, the times are definitely changing fast. Every day, engineers are met with exceeding demand for finely tuned, reliable and robust process control. PID control and tuning is the most advanced and essential tool of the trade available to engineers as they rise to meet this emerging demand.
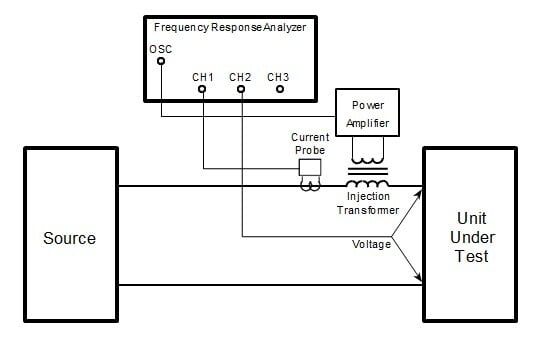
Block Diagram of a PID Tuner in a Feedback Loop
Venable Instruments Frequency domain analysis technologies are tailored specifically to assist and support engineers in just this effort. By providing you, the engineer, with the ability to model a system instantly from recorded data, evaluate controller performance at the touch of a button and tune the control to compensate for your unique performance goals all from one, user-friendly and intuitive interface, Venable Instruments seeks to empower engineers to get the most out of their systems and deliver high-quality, performance-driven outcomes for customers and key stakeholders.
“When tuned optimally, a PID controller reduces deviation from the set point, and reacts to disturbances… rapidly but with minimum overshoot”
The practical perspective
Now you may be thinking, “Great! How does this work exactly?”
To answer that question, let’s follow this theoretical scenario: Let’s say you’re working in manufacturing and industrial automation. Day in and day out, you’re hard at work developing new solutions to help enhance your company’s product delivery and meet customer needs better and faster. You’re reviewing production reports, patrolling for any irregularities that might affect your goal. Ah! The controller that’s being used on the factory floor to regulate temperature in the plant’s process is regularly overshooting and resulting in product losses! What’s going on? Oh, that’s right! Your company recently started ordering plastics from a different vendor to enhance product quality, and the PID control loop has not been tuned appropriately since then. It’s time for you, the engineer, to spring into action!
PID tuning implementation
If you are responsible for working with PID temperature controllers, you have probably already discovered that such loops can be challenging and that the needs of a given controller and application can vary widely

So your plan is to tune the PID control loop of a temperature controller to optimize temperature regulation for the process. But what does that mean? That means that the numerical parameters (including corrective gain, reset time and rate) associated with the Proportional, Integral and Derivative terms in the control algorithm should be adjusted to get the best possible control for a particular process. Now this can be an extensive problem requiring in-depth modeling, measurement, and accounting of system performance, and there are several different methods for accomplishing this.

“...having to determine the appropriate PID values for the thermal system… empirically, often (costs) a large amount of time trying various combinations of values to see which works best”
This is often done manually using the “trial and error” method, whereby the engineer “turns off” integral and derivative terms to adjust the proportional control while observing the system response until the response characteristics are optimal, then adds and adjusts the integral control term before adding and adjusting the derivative control terms per the system requirements.
"If this must be done in a production environment where varying loads must be tested at multiple temperatures, the amount of wasted time can grow quickly.”

PID Controller
Engineers have access to a vast array of products and software to assist with this, including expensive so-called “autotuning” software that promises to automatically adjust tuning parameters to achieve optimal performance. But as the engineers of PID autotuning software will admit: “if the autotune algorithm does not provide adequate control for the particular application, then the unit must be tuned using trial and error.”
“if the autotune algorithm does not provide adequate control for the particular application, then the unit must be tuned using trial and error.”
So is there a better and more reliable approach to PID tuning? Yes. By importing frequency domain system response data into Venable Instruments' System Identification, Analysis and Design software (SIAD), the steps of system identification and PID loop optimization can be conducted almost instantly with the touch of a few buttons. SIAD’s suite of math and logic tools enable a speedy and reliable alternative to both “trial by error” and “autotuning” methods, combining the advantages of the experimental and empirical approaches.
Conclusion:
By incorporating SIAD into your plant’s production process, the powerful benefits explored in this theoretical approach can become a reality in your engineering process. With a host of robust, easy to use PID tuning tools, SIAD can help you consider and implement countermeasures for changing plant conditions, product specifications, or any other parameter quickly and effectively. Find out how SIAD can become your partner in progress, by registering for a 14 day trial.