Introduction
First proposed in the early 1920’s, proportional-integral-derivative (PID) algorithms are the gold standard in industrial control systems design and optimization. Almost all industrial automatic control systems rely on PID tuning in one form or another, whether in steering and guidance systems for heavy vehicles, temperature and fluidic systems in manufacturing and refinement processes, and even industrial motion control systems. A century later, the critical impact of PID algorithms is felt by power, industrial, and automation engineers all over the world, giving rise to a new generation of intuitive control methods that can make the world safer and more productive.
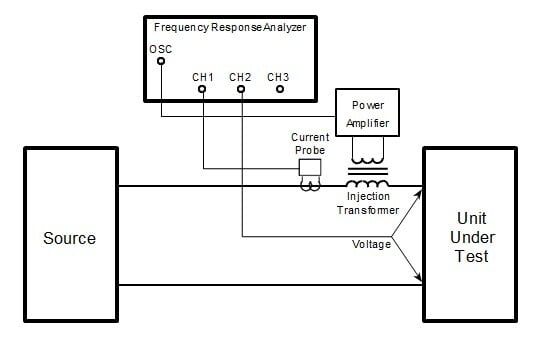
Operator Performing Manual Control - PIP Controller Performing Automatic Control
What is PID Control?
PID control refers to an algorithmic approach to modulating the roughly independent system inputs (e.g. temperature, torque, etc.) using proportional, integral and derivative relationships. User input as well as feedback from the system each have a place in the proportional-integral-derivative algorithm and contribute to the output.
Proportional control refers to correction by a factor:

The correction depends on the size of the difference between real and desired output, e(t). However, with only proportional control, the system error can never truly reach 0 because the correction approaches 0 as the error approaches 0.
Integral control refers to correction by an accumulation of error:
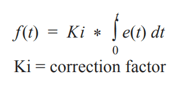
The correction depends on the duration of the error, so that even a small error, if persistent over a long enough period of time will trigger greater correction. However, with this approach, the necessary delay in the correction means that there will likely be some overshoot and/or oscillation around the desired output value.
Derivative control refers to correction by the rate of change of the error.
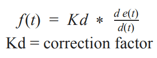
The correction depends on the rate of change in the error and thus responds to the relative efficacy of the overall control system. When approaching the desired output, the correction is lessened.
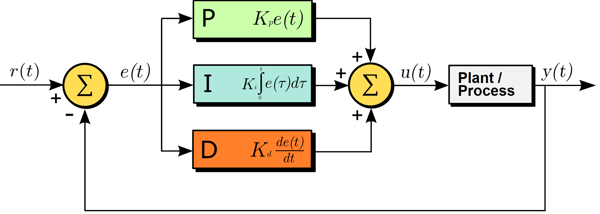
PI, PD, and PID control among other such combinations refer to feedback systems that include proportional, integral and derivative operations to achieve desired output:

“With enough information about the process being controlled, it may be possible to calculate optimal values … for the PID controller”
Block Diagram of a PID Controller in a Feedback Loop
What is PID Tuning?
Real processes have varying nonlinearities and non-deal system realities, including airflows, ambient temperatures, human input, and even electrical fluctuations. In order to obtain reliable system output, the aforementioned PID settings, including the K gains and time intervals for integration and derivation, must be carefully modulated to account for these variations. PID tuning refers to any method of altering these settings to achieve the optimal combination and performance. Manual, heuristic, automatic and other tuning methods have been proposed for this purpose, but all seek to minimize error and overshoot and maximize system reliability and performance.
“Poor tuning can have a number of deleterious effects on a pick-and-place
application, the most obvious being that the system isn’t stable or accurate”
Manual tuning refers to using one’s own knowledge of control theory to select and modify gains and rate constants. This can be accomplished by accounting for the system transfer function characteristics including the system ‘poles’ and the shape of the loop plots or using simulations that have been developed by other engineers to estimate the parameters. Automatic tuning is common as well, and involves relying on software to automatically select optimal parameters for the PID controller. In either case, a robust platform of software tools is needed if one desires to simply and efficiently tune the controller. Most industrial plants have hundreds of PID control loops operating in tandem and often interacting with one another. Regular tuning should be performed when testing a system or whenever outputs are not within the expected range to maintain safe and efficient control.
“regularly scheduled tuning – say every twelve months – offers a degree of
assurance that each PID loop is properly calibrated”
Applications
Control of trajectory is a primary application of PID control and tuning, including in path planning for robots. Industrial robots often rely on PID algorithms for guidance of motors and actuators, where sensors determine the actual motion of the robot, and path planning algorithms provide the desired motion. PID methods are then used to calculate the compensation needed to accommodate physical realities and accomplish the desired motion.
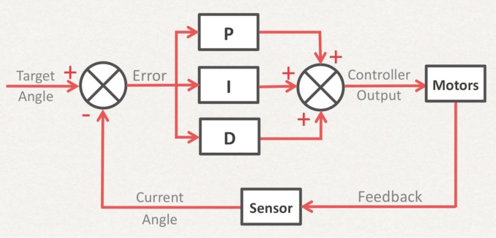
Diagram of PID controller being used on a self-balancing robot
There are of course a host of other salient applications for PID tuning in every sector of industry, ranging from automatic piloting of aircrafts, to the regulation of industrial process variables like flow, temperature and pressure.
Conclusion
The need for increasingly advanced, safe, and efficient control mechanisms is undeniable and has never been higher than it is today. Engineers seeking better, more reliable and more robust performance should use PID tuning to maximize the performance and reliability of industrial systems. Venable Instruments’ SIAD (System Identification, Analysis and Design) software provides engineers with a suite of onboard, easy to use automatic PID tuning tools to automatically adjust PID coefficients of your controller to quickly optimize your control system. Intuitive plotting and visualization tools help you identify system characteristics and transfer learnings into real design and control improvements. Engineers need only import frequency domain data describing the system to avail themselves of SIAD’s powerful PID tuning tools.
Image Sources:
The Modern Industrial Workhorse: PID Controllers, Tech Briefs
The PID Controller, Chillibasket